

JUNE 2023 I Volume 44, Issue 2
Rotor Broadband Noise Modeling and Propeller Wing Interaction
JUNE 2023
Volume 44 I Issue 2
IN THIS JOURNAL:
- Issue at a Glance
- Chairman’s Message
Conversations with Experts
- Interview with James B. Lackey
Workforce of the Future
- Rotor Broadband Noise Modeling and Propeller Wing Interaction
- Broadband Noise Prediction from Leading Edge Turbulence Quantities
- Training Generative Adversarial Networks on Small Datasets by way of Transfer Learning
Technical Articles
- Positioning Test and Evaluation for the Digital Paradigm
- Integrating Safety into Cybersecurity Test and Evaluation
News
- Association News
- Chapter News
- Corporate Member News
Rotor Broadband Noise Modeling and Propeller Wing Interaction
Brendan Smith
HPC Internship Program, DoD High Performance Modernization Program Lorton,VA
Rensselaer Polytechnic Institute, MANE, Troy, NY
Abstract
The goal of this project was to integrate NASA’s Aircraft Noise Prediction Program (ANOPP2) into the RCAS2WOPWOP code suite. The implementation was made to be generalized for an arbitrary number of rotors, requiring changes to the previous ANOPP2 procedure to allow for multiple ANOPP2 runs in succession.. Individual rotor noise predictions are combined into a total noise prediction. Another second goal was to use the updated RCAS2WOPWOP code suite to predict noise for a propeller-wing case, focusing specifically on the influence of interactional aerodynamics on the predicted noise. A case with an isolated propeller was run, then a propeller-wing case, and the results were compared to highlight where interactional aerodynamics had altered the noise produced.
Keywords: VTOL, eVTOL, rotorcraft, helicopter, aeroacoustics, noise prediction, broadband noise, aerodynamics, acoustics
Introduction
Improvements to large scale electric batteries and motors has led to increased interest in electric takeoff and landing (eVTOL) vehicles. The designs of these vehicles differ when compared to traditional rotorcraft due to benefits gained by distributed electric propulsion. eVTOL are being considered for many different missions, with the civilian side seeing missions like delivery of goods and people while military applications like surveillance and cargo transportation are being considered.
A key technical challenge is the noise generated by these new eVTOL configurations. The noise of conventional helicopters is well understood, with many decades of research outlining the core noise sources1, including thickness noise, loading noise, high-speed impulsive noise, and blade-vortex interaction noise. Due to the difference in scale and conditions of these new eVTOL designs, different noise sources have been highlighted that are not significant for traditional helicopters, such as broadband noise, rotor-rotor interaction, and rotor-airframe interaction, and many groups have performed studies investigating these noise sources, 2-7.
The first part of this work updates the computational tools for predicting rotor noise, specifically broadband noise. The Army Research Laboratory (ARL) already has developed a robust code suite pairing the aerodynamic tool, Rotorcraft Comprehensive Analysis System (RCAS), with the acoustic prediction code PSU-WOPWOP. This code suite handles tonal and broadband noise predictions for arbitrary vehicle designs, but previous work has shown NASA’s Aircraft Noise Prediction Program (ANOPP2) to be better at predicting broadband noise when comparing to experimental data. Therefore, the code suite is updated to include ANOPP2 which will handle broadband noise predictions while PSU-WOPWOP is used to predict tonal noise.
The second part of this work investigates a propeller-wing case common in some eVTOL designs that look towards wing borne cruise. The conditions found in a propeller-wing case are unlike those found on traditional helicopter platforms and need to be investigated to develop more understanding for the designs. The prop-wing case is run using the updated RCAS2WOPWOP code suite, now including ANOPP2 for broadband noise predictions, and then compared to a case with just the isolated propeller. This allows for understanding of how the aerodynamic interactions present in the prop-wing case effect the aeroacoustics, with noise investigated for a single observer as well as an observer hemisphere.
Methods
2.1 ANOPP2 Implementation
The code suite RCAS2WOPWOP is a Python code suite that runs RCAS and on completion generates inputs for the acoustic prediction code, PSU-WOPWOP. RCAS can provide most of the information required for the acoustic predictions, with tonal noise predictions requiring geometric definition of the rotor and the loading or pressure map on the rotor to generate associated geometry and loading files for PSU-WOPWOP. The code then generates a run file for PSU-WOPWOP, including information like rotational speed, rotor positions and orientations, and the desired acoustic outputs to be generated. For broadband noise, additional settings are included to enable the built in Brooks, Pope, and Marcolini (BPM) method for calculating broadband noise. This method requires additional input files which can be created from the RCAS solution including:
- Blade section chord
- Blade section length
- Blade section trailing edge thickness
- Blade section trailing edge flow angle
- Blade life-curve-slope
- Blade section angle of attack
- Blade section incident velocity
The modifications required are to add an additional set of Python scripts that generate inputs for an ANOPP2 broadband noise prediction, in addition to the already existing PSU-WOPWOP case. This allows the broadband noise to then be added to the tonal noise generated by PSU-WOPWOP for a total noise prediction, or to compare the broadband noise produced by PSU-WOPWOP and ANOPP2.
ANOPP2 uses the same empirical model as PSU-WOPWOP, the BPM method, and many of the inputs required are the same, with some additional values required. There is a need to assume values for some of the inputs, such as zero pitch angle of attack, trailing edge angle, and blunt trailing edge thickness which are all airfoil shape related, and not necessarily included with the RCAS model. Future work could couple the airfoil information to this framework, allowing for extraction of the information and thus more complete generic runs. The inputs are bundled into a data structure based on radial and azimuth station, which is then used to create an input file. Along with an input file, a run file is also required which has information such as the rotor radius, rotational speed, and observer locations, which are taken directly from the already existing framework.
It is also important that this implementation is generic enough to handle multi-rotor applications, as many proposed vehicle designs include more than a single rotor. The chosen method for multi-rotor cases is to run ANOPP2 for each rotor, requiring generation of a unique input file and run file for each rotor. While multiple rotors inside of a single ANOPP2 run could be possible, it is beyond the scope of the current work and the computational cost incurred from multiple runs is minimal when compared to the runtime required for tonal noise computation or RCAS aerodynamic prediction. Once all ANOPP2 runs are completed, the noise from each rotor is combined using the following equation

with the subscripts on the SPL’s denoting the rotor number. These combined values are placed into files of the same format as the default ANOPP2 outputs and placed into a folder while keeping individual rotor noise in separate folders for further comparison.
2.2 Propeller-Wing Case
The propeller-wing case is of interest due to its presence on many concept eVTOL aircraft, and a lack of established precedent on modeling this type of noise. The propeller details are given in Table 1, and the setup of the wing in relation to the propeller is shown in Figure 1.
The simulations are run using the updated code suite as discussed in section 2.1, with RCAS settings using the viscous vortex particle method (VVPM) to allow for aerodynamic interactions between the propeller and wing to be captured. VVPM has a low cost compared to full computational fluid dynamics (CFD). Cases are run with and without the wing present to capture the effects the aerodynamic interactions have on the noise produced by the propeller. Noise is predicted at a single observer placed at 45° elevation angle, as well as a hemisphere of observers as shown in Figures 2 and 3. Hemisphere observers are placed in 10° increments in both azimuth and elevation at 10 times the propeller radius.
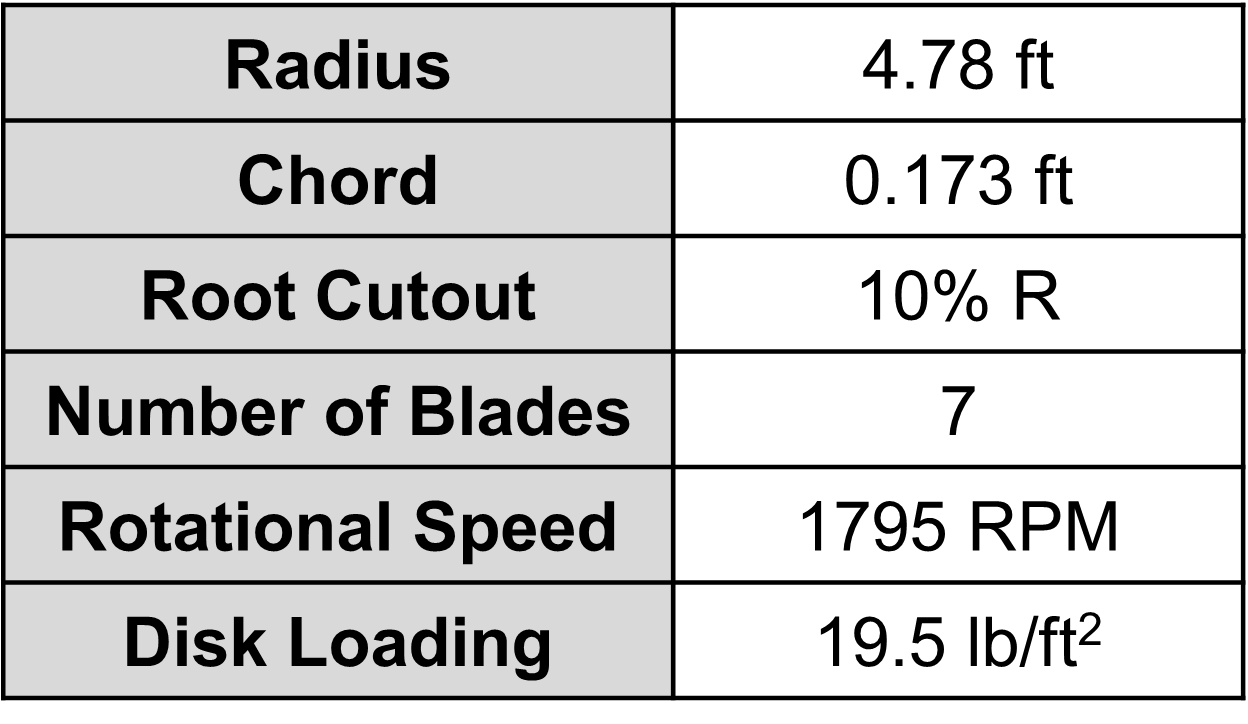
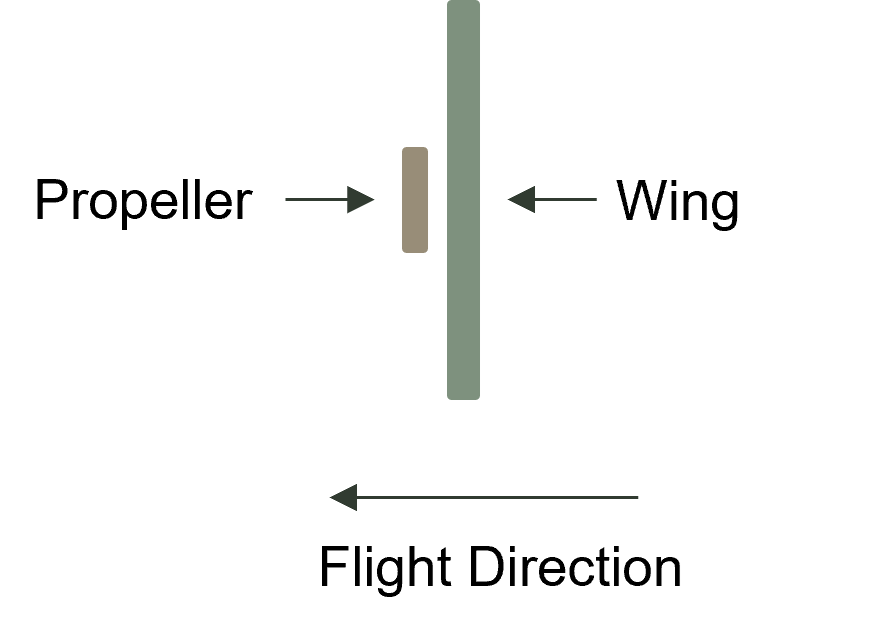
Figure 1: Table 1. Propeller details and the setup of the wing in relation to the propeller
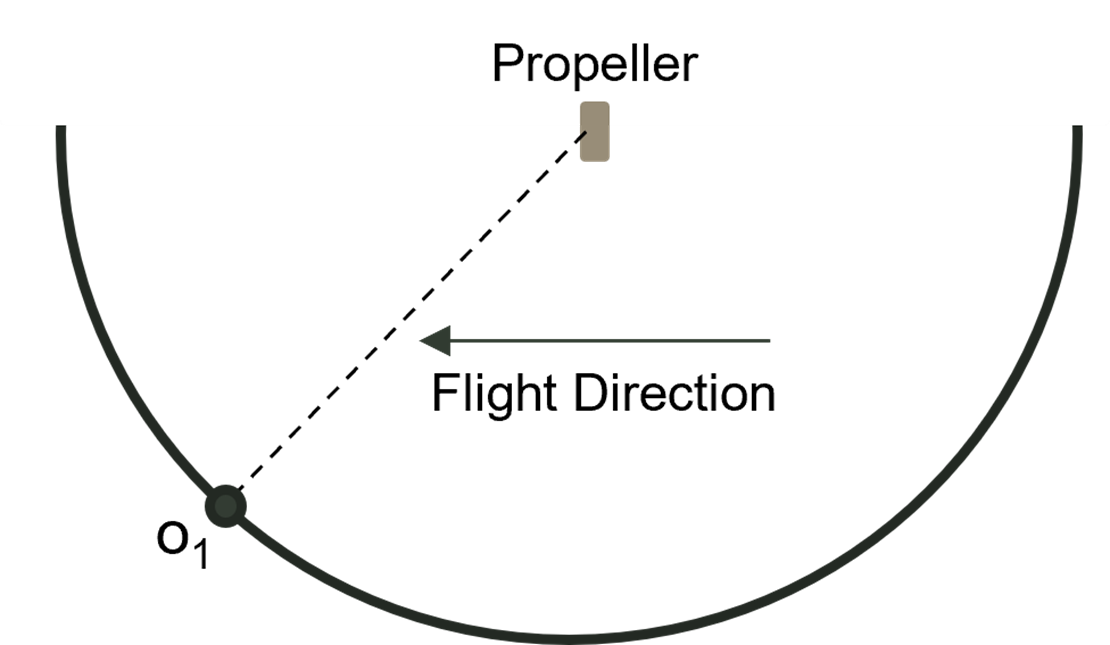
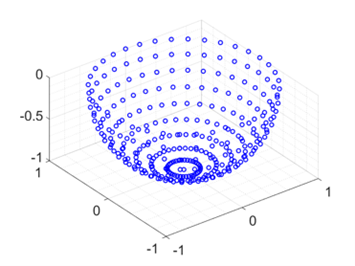
Figure 2: Side view of propeller, showing single observer and observer hemisphere locations
Figure 3: Hemisphere of observers placed in 10° increments in azimuth and elevation
Results
3.1 ANOPP2 Implementation (Quadrotor Example)
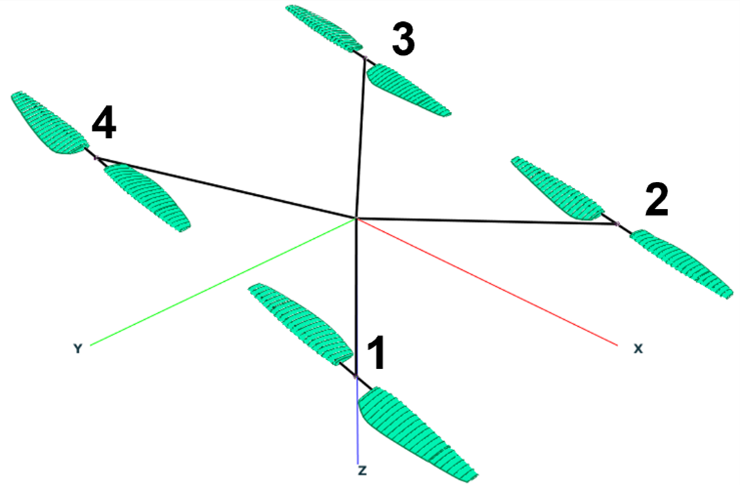
Figure 4: Quadrotor with labeled rotor numbers
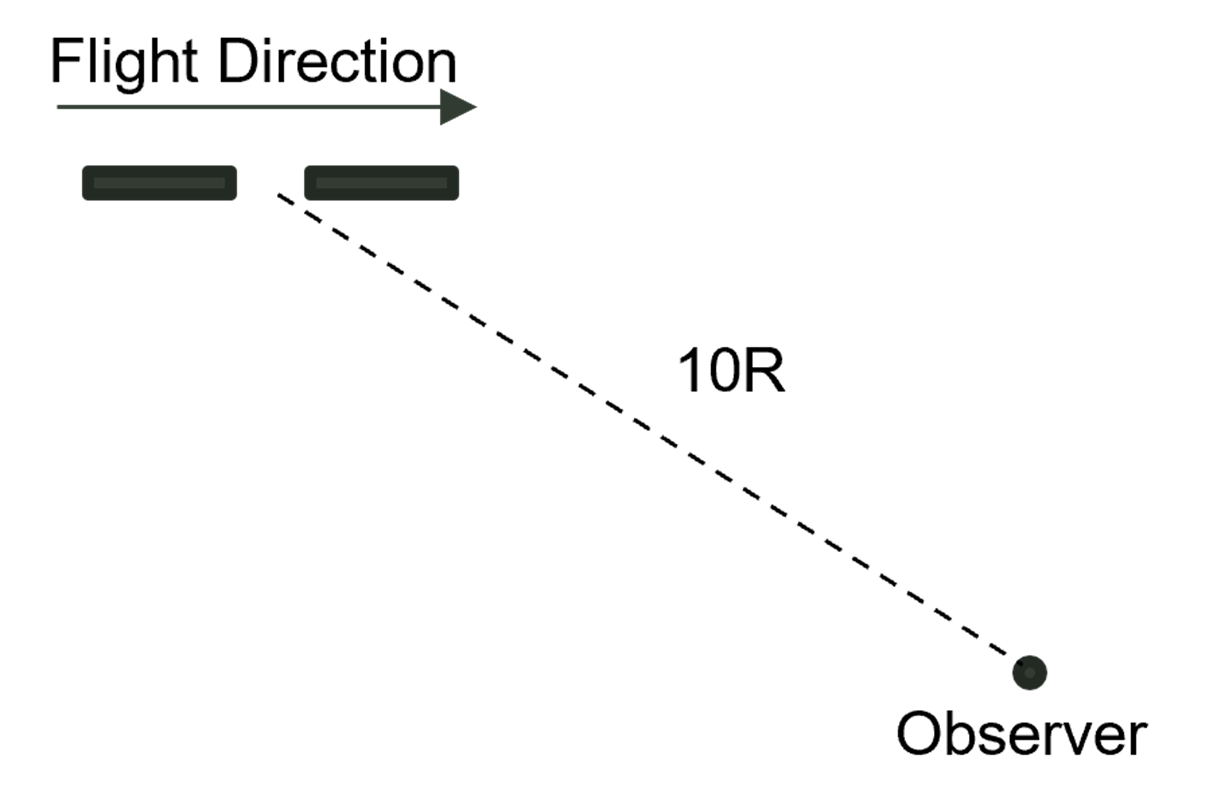
Figure 5: Observer for quadrotor case
The vehicle is shown in Figure 4, with the observer placed at 45° elevation being considered in
Figure 5. We can first look at the multi-rotor implementation, shown in Figure 6. This shows a
Sound Pressure Level (SPL) graph, which is noise as a function of frequency.
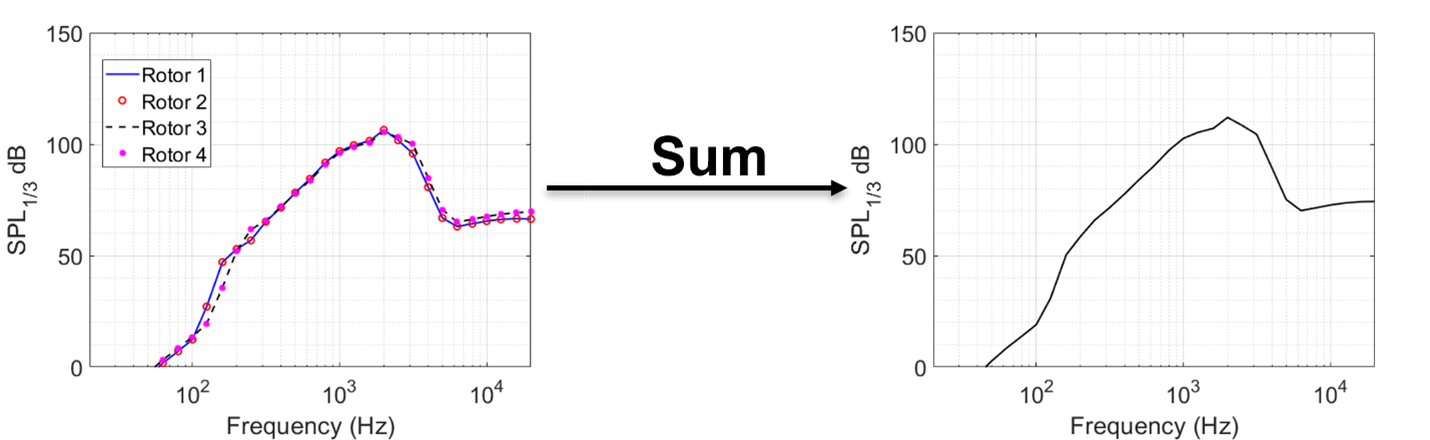
Figure 6: (Left): Broadband noise prediction for individual rotors in quadrotor case (Right): Total broadband noise through summation of all rotors
Here we have the broadband noise from each individual rotor as run through our multi-rotor
generalization implementation. We then sum them to get the black curve shown on the left. Finally, to
put this all together, we combine the tonal noise to this broadband noise prediction, to achieve the final
noise curve. This additive process is shown in Figure 7. Through this example and the outputs garnered,
we can see that ANOPP2 was successfully implemented into the RCAS2WOPWOP framework to
compute broadband noise.
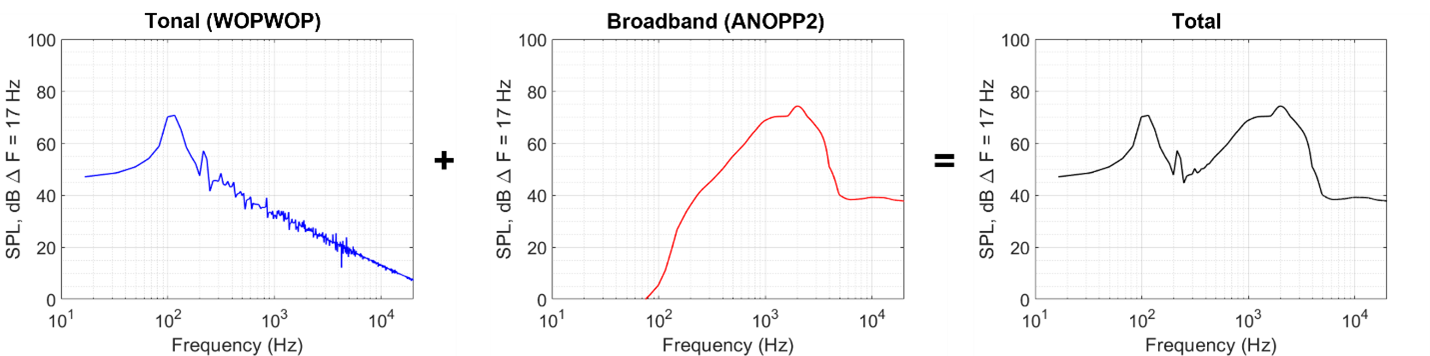
Figure 7: Combination of tonal noise from PSU-WOPWOP and broadband noise from ANOPP2, yielding total noise prediction
3.2 Prop-Wing Results
Starting with the single observer discussed in the methods section, we can look at the SPL graphs for the no wing and with wing cases, given in Figure 8. Comparing the peaks of lower blade passage frequencies (BPF) the no wing case has much larger tonal noise. But, when looking specifically at multiples of the 8th BPF, the with wing case has large tonal noise spikes that far exceed the peaks seen in the no wing case.
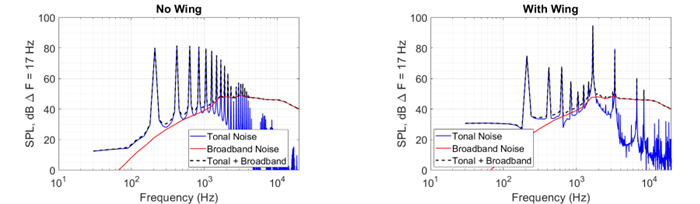
Figure 8: Single observer tonal noise, broadband noise, and total noise for (left): No Wing (right): With Wing cases
These spikes can be directly attributed to the aerodynamic interactions caused by the presence of the wing. Broadband noise is comparable between the two cases. The effect on overall sound pressure level (OASPL) can be examined in Figure 9. This shows that even though the lower BPF peaks are higher for the no wing case, the with wing case has a higher tonal noise value due to those large spikes exhibited. But when broadband noise is added the overall noise values become much closer.
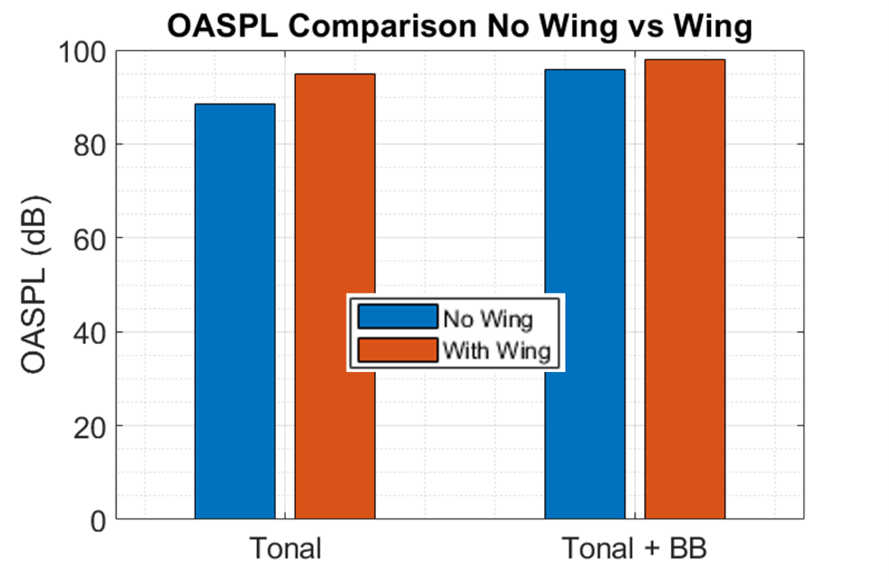
Figure 9: OASPL comparison of no wing and with wing case (left): tonal noise (right): total noise
Focus can now be shifted to the observer hemispheres shown in Figure 10, which gives the
OASPL for the no wing case and the prop-wing case. The noise shown in the two propeller cases has the same shape across the hemisphere, with higher noise regions concentrated near to in plane with the propeller, with slightly higher noise concentrated behind the propeller. The low noise regions are directly in plane with the propeller as well as directly in front of and behind the propeller. The only differences easily spotted between the two is slight differences in magnitude and shape of the high and low noise regions. To visualize more easily, a difference is taken where the no wing case noise is subtracted from the prop-wing case, which is given in Figure 11. Here we can see that in general, the prop-wing case is quieter across the hemisphere, with only small pockets of higher noise. The cause of this was not investigated in this summer’s research, although some possible sources are given in the conclusion section.
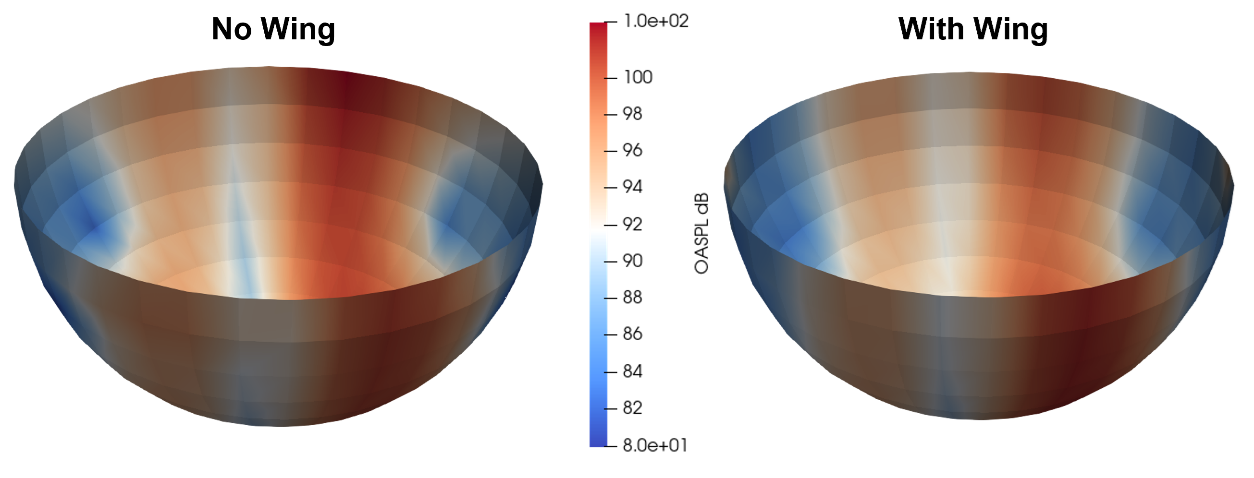
Figure 10: OASPL across observer hemisphere for (left): No wing (right): prop-wing
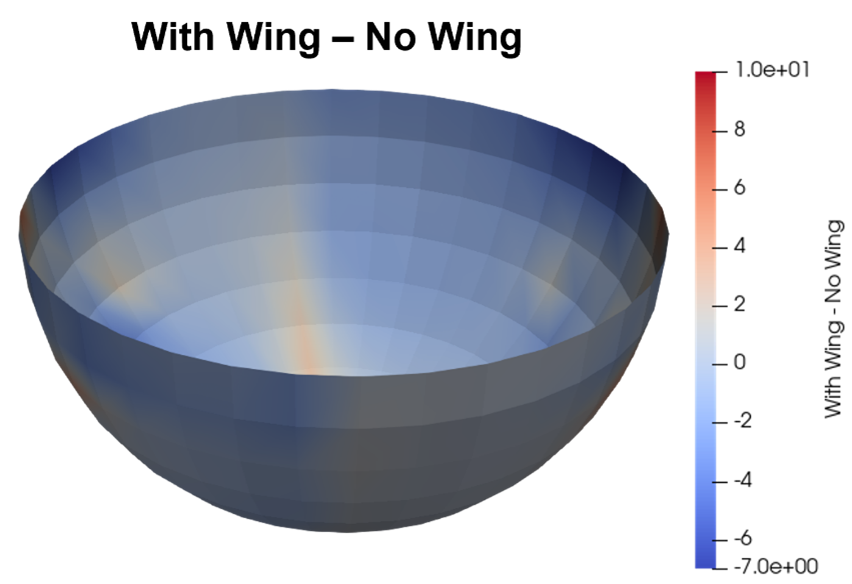
Figure 11: Difference hemisphere of (prop-wing) – (no wing)
Conclusion and Future Work
4.1 ANOPP2 Implementation
The implementation of ANOPP2 for generic multi-rotor systems broadband noise prediction was successful as shown in the results section. Some improvements can still be made, specifically on further improving the inputs by using airfoil section information to inform airfoil specific data. No major changes are still to be implemented, as all the desired goals have been met. Additionally, ANOPP2’s tonal noise computation could be implemented, using it as a full alternative to PSU-WOPWOP instead of the current use for broadband noise only.
There are also some minor improvements that could be made to further streamline the process of the RCAS2WOPWOP framework. Currently all post-processing, specifically combining of tonal and broadband noise, is handled outside of the framework requiring extra scripts that are unique to each user. While this isn’t a priority concern, there is still the option of combining noise sources into a streamlined data format so that results from ANOPP2 and PSU-WOPWOP don’t need to be deconstructed and subsequently reconstructed into the same format. Similarly, ANOPP2 does not output Overall Sound Pressure Levels (OASPL) for the observers, and minor scripts could be added to reduce the burden on individual users.
4.2 Prop-Wing Case
The results for the case are a good first step, but much investigation is left to be done. The effects are described in this paper, but more work must be done to further understand where these differences come from. A few good first steps include looking into how the loading across the propeller changes with and without the wing and see if the reduction in tonal noise comes from a reduction in the overall lift on the propeller, or merely a shifting of the high lift regions. Besides looking at SPL, there is also a need to investigate the pressure signal from the propeller and see how the signal is changing, and what sort of implications that might have on the noise of the system. A final initial check would be to look at A-weighting over the hemisphere and see if the same reduction is found. The presence of the wing caused an increase in noise at higher frequencies for the single observer, and this would have an effect when A-weighting is applied to the noise which could change the outcome.
Acknowledgement
I (BS) would like to thank Dr. George Jacobellis, my DoD HIP mentor at the Army Research Laboratory in Aberdeen Proving Ground, MD, for giving me mentorship and guidance. I also wish to thank the DoD HPC Modernization Program for use of the supercomputers and sponsoring me for the HPC Internship Program.
References
1. Schmitz, F., “The Challenges and Possibilities of a Truly Quiet Helicopter: 29th Alexander A. Nikolsky Honorary Lecture,” Journal of American Helicopter Society, Vol. 61, No.4, 2016, pp. 1-33.
2. Zawodny, N., and Boyd, D. D., “Investigation of Rotor-Airframe Interaction Noise Associated with Small-Scale Rotary-Wing Unmanned Aircraft Systems,” 73rd Annual Forum of the American Helicopter Society, Fort Worth, TX, May 2017.
3. Pettingill, N. and Zawodny, N., “Identification and Prediction of Broadband Noise for a Small Quadcopter,” 75th Annual Forum of the Vertical Flight Society, Philadelphia, PA, May 2019.
4. Schiller, N., Pascioni, K., and Zawodny, N., “Tonal Noise Control using Rotor Phase Synchronization,” 75th Annual Forum of the Vertical Flight Society, Philadelphia, PA, May 2019.
5. Intaratep, N., Alexander, W., and Devenport, W., “Experimental Study of Quadcopter Acoustics and Performance at Static Thrust Conditions,” 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, May 2016.
6. Tinney, C. and Valdez, J., “Acoustic Scaling for Small Rotors in Hover,” 75th Annual Forum of the Vertical Flight Society, Philadelphia, PA, May 2019.
7. Passe, B. and Baeder, J., “Computational Aeroacoustics of Different Propeller Configurations for eVTOL Applications,” Vertical Flight Society’s Autonomous VTOL Technical Meeting and Electric VTOL Symposium, Mesa, Arizona, Jan. 2019.
Author Biographies
Brendan Smith received his Bachelors degree in Mechanical Engineering at Clarkson University. He is working towards completing his PhD from Rensselaer Polytechnic Institute in Troy, NY. His research is focused on aeroacoustics of eVTOL rotors, including the effects of rotor phasing and rotor-rotor aerodynamic interactions on acoustics. He took part in the High-Performance Computing Modernization Program Internship Program where he worked on writing software to integrate NASA’s ANOPP2 noise prediction software with the Army’s Rotorcraft Comprehensive Analysis System.
Dr. George Jacobellis received Bachelors and Masters degrees in Aerospace Engineering from The University of Texas Austin. He completed a PhD from Rensselaer Polytechnic Institute in Troy, NY where his research included computational fluid dynamics and vortex particle simulations of high-speed coaxial helicopters. He is now an employee at the U.S. Army Research Laboratory where he continues to work with rotorcraft aerodynamic and acoustic simulations including simulating broadband noise and studying the boundary layers on multi element airfoil configurations.
